Simulation Optmization
AGV系统仿真平台(Beta版)
平台简介
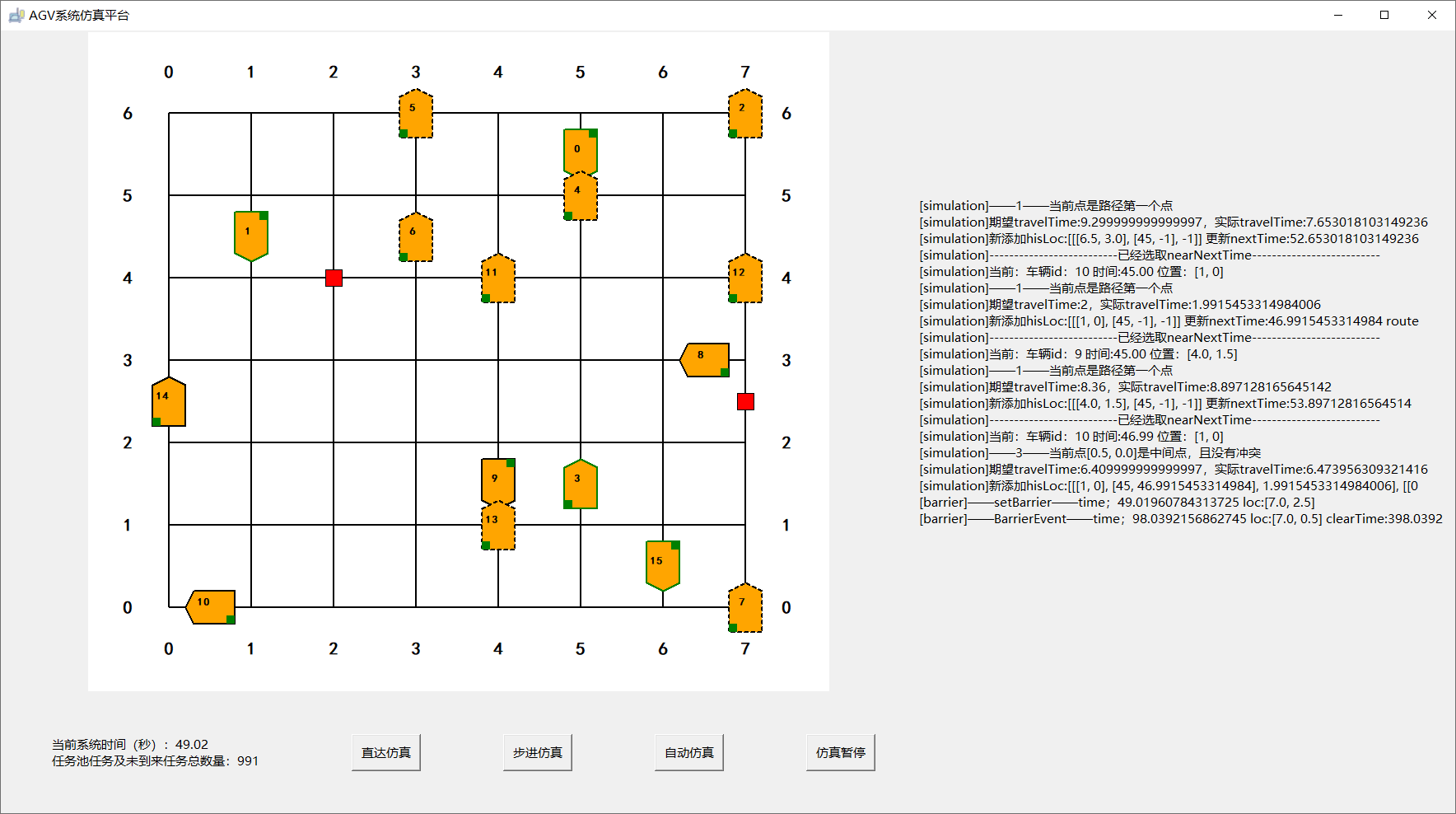
本平台是石志浩&沈海辉(2024)中设计开发的基于离散事件仿真技术的AGV系统仿真平台。 它可以灵活地设置调度问题,并选择调度算法中的任务指派策略、路径规划算法和路径冲突应对策略进行仿真。 该平台具有可视化的界面,可以直观地观察AGV的运行状态和调度算法的表现,也可以输出最终的仿真实验统计数据。 关于本平台的设计背景、逻辑架构、内置调度算法等的详细说明,请见石志浩&沈海辉(2024)。
软件下载
压缩包中包含文件
|-- AGV系统仿真平台Beta.exe
|-- BatchRun.py
|-- map.json
|-- mission.json
|-- setting.json
|-- 说明.txt
使用说明
石志浩&沈海辉(2024,§4)中的实验输入
压缩包中包含文件
|-- map.json
|-- mission.json
|-- 总体说明.txt
|-- 4.2 CAS中重调度周期的影响
|-- setting_Case1_重调度周期x.json
|-- setting_Case2_重调度周期x.json
|-- setting_Case3_重调度周期x.json
|-- 说明.txt
|-- 4.3 AGV调度算法效果对比
|-- setting_Case1_冲突应对策略x.json
|-- setting_Case2_冲突应对策略x.json
|-- setting_Case3_冲突应对策略x.json
|-- 说明.txt
|-- 4.4 CSS特性探究
|-- setting_维度x.json
|-- 说明.txt
参考文献
石志浩, 沈海辉 (2024). 不确定情景下AGV系统调度算法的离散事件仿真. 系统仿真学报, 36(2):385-404.
作者
© simopt.github.io
Last Update: 2024-11-13